
2024 Robot

- Width:
- Length:
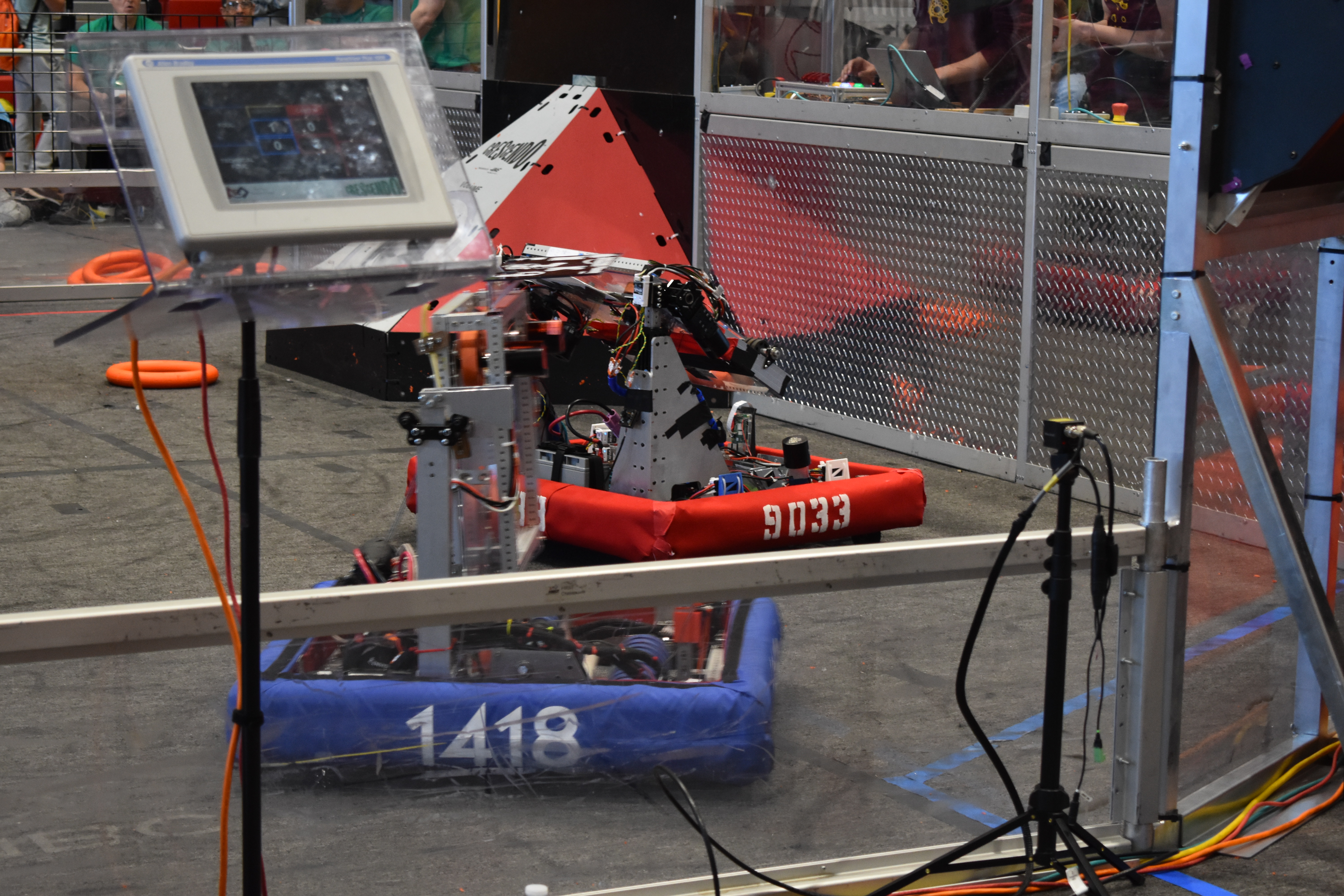
The 2024 game, sponsored by Gene Haas Foundation, focused on the delivery of foam donuts via throwing them into an elevated target or depositing them into one closer to the ground. the official video reveal.
Robot Abilities
- Drive Train: Our 2024 robot uses a square swerve drive, which enables us to strafe in any direction and to turn freely. For our swerve drive we are using MAXSwerve modules.
- Delivery System:
- Speaker: We utilized several rubber fly wheels that could be accelerated quick enough to propel the notes through the air. This allowed us to score the notes in the elevated speaker, helping us gain points.
- Elevator: We also used the fly wheels for slow depositing into the amp. This involved us rotating our shooter downwards in order to position it in a way that was able to slowly deposit the note into the goal.
- Bumpers: The reversible bumpers allow us to quickly and efficiently transition alliance color between matches.
Programming
Our robot is programmed in Java due to the vast amount of Java libraries and resources available to us through WPILib. As this year's team was new to programming swerve drive, we decided to first learn how to swerve drive works by reconstructing and programming our old Swerve Mark 2 chassis from 2017. One useful feature we programmed into this year's robot was reactive LED lights that change color when performing or completing actions, allowing the drive team to be more informed on what was happening.
- Autonomous: This year, we wrote multiple autonomous routines in Java using Pathplanner, the most impressive of which can score two game pieces into top nodes of the grid.
For scouting this year, we used The Purple Warehouse. This application allowed us to efficiently record other robot's cycles and scoring capabilites. Though it was only a temporary solution for this year's absence of VictiScout, it still proved to be functional.
We drive using a pilot-copilot method: the first driver controls robot motion and the second various other operations, making operating the robot more efficient.
All of our code is open source, and can be found on our GitHub organization.
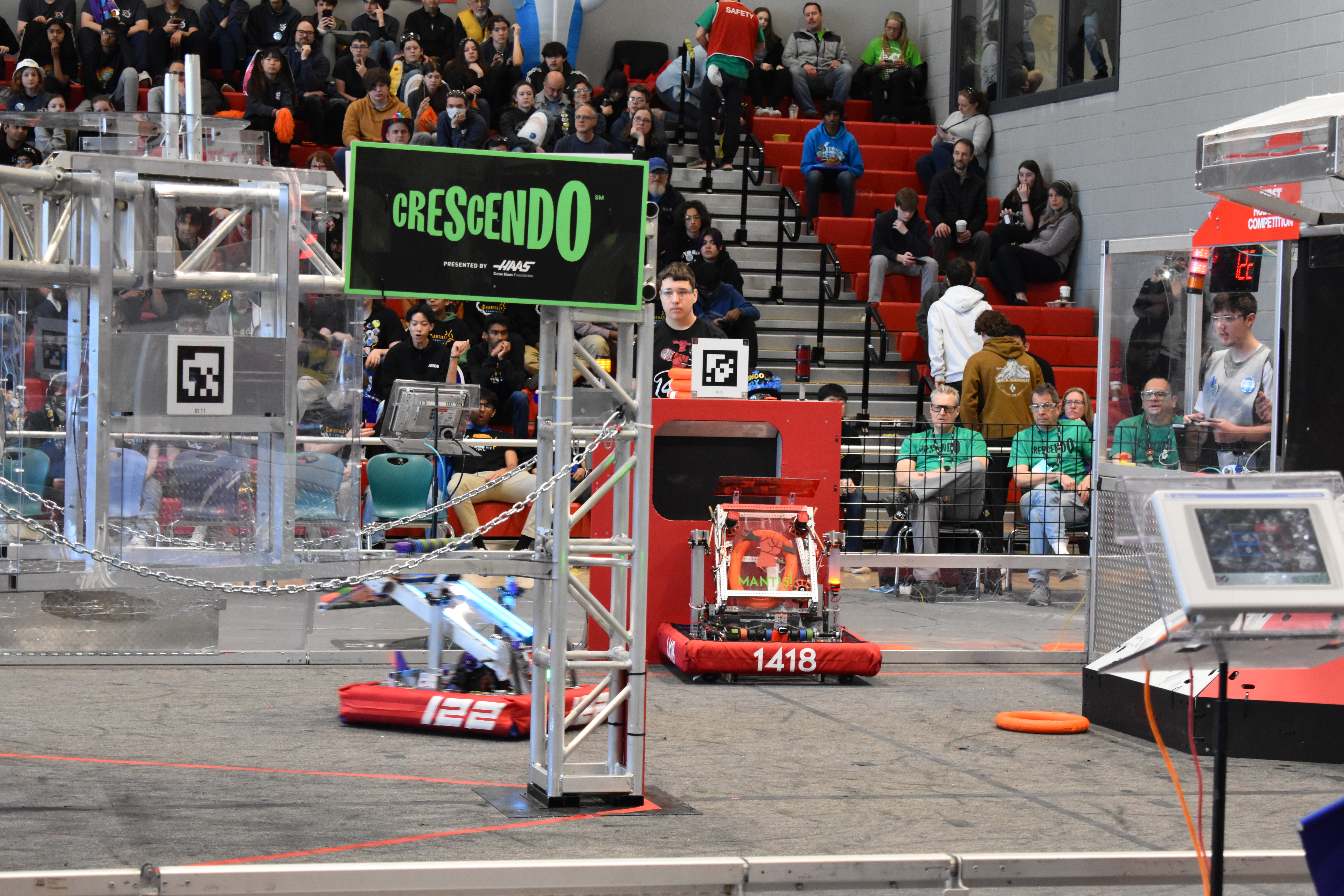

Competition Performance
We attended two regional events this season, including one of our first hosted events at our own high school, Meridian High School. We scored enough points to qualify for districts, but unfortunately we did not have enough money and we had a damaged robot. Though we did not have that successful of a season, our competition performance was still impressive, as we were alliance captain 2 in our second competition. We also won the sustainability award for our second competition. You can check out some of our performance here on Blue Alliance, and look out for videos on our YouTube and Instagram pages.